Robot Localization
 Demo
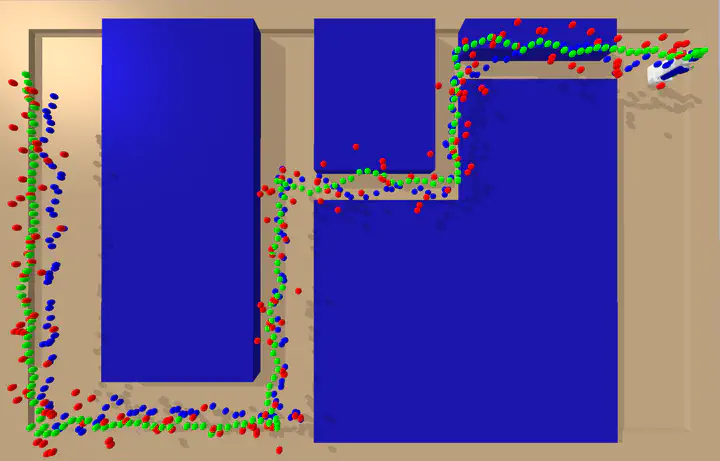
DemoIn this project, we introduced, compared and analyzed two robot localization algorithms: Kalman Filter and Particle Filter. Extensive experiments were conducted under a curated simulation environment which covers scenarios including PR2 robot moving forward in a spacious environment, turning around, and moving in corridors with different widths. After comparison and analysis, we conclude that while Kalman filter is more efficient and generates lower error overall under Gaussian noise, particle filter is more robust and generates more realistic outputs when most of the surrounding space is unreachable.